Objectifs de certification
CCNA 200-301
1.3 Comparer les interfaces physiques et les types de câble
- 1.3.a Fibre monmode (Single-mode) et fibre multimode, cuivre
- 1.3.b Connexions (Ethernet shared media et point-to-point)
- 1.3.c Concepts sur PoE
1.4 Identifier les problèmes d’interface et de câbles (collisions, errors, mismatch duplex, et/ou speed)
Technologie Ethernet
La technologie Ethernet dispose de ses propres caractéristiques en matière de câblage, de normes, de formats de trame et de méthode d’accès. Aussi avec PoE, Ethernet est capable d’alimenter les périphériques. Enfin, on fournira dans ce chapitre la méthode de diagnostic de couche 1 (L1) concernant les câbles utilisés en technologie Ethernet avec un périphérique Cisco.
1. Supports de transmission et protocoles LAN
1.1. Câblage et environnements bruités
Le câble cuivre ou en fibre optique et l’air transportent les données transmises. Mais ces supports exigent une connectique et un placement correct sans quoi le signal risque de se dégrader.
Tous les supports peuvent connaître des sources de bruit qui dégradent le signal.
Les supports ont aussi leurs caractéristiques en vitesse et en portée.
1.2. Cuivre
Les supports en cuivre comme la paire torsadée ou le câble coaxial sont sensibles aux interférences électromagnétiques : ascenseurs, néons, engins de puissance, etc. peuvent engendrer des interférences sur les câbles de données proches.
La longueur d’un segment physique d’un câble à paires torsadées est limitée à quelques dizaines de mètres voire quelques centaines de mètres dans certains formats, mais avec des pertes assez fortes qui nécessitent la répétition du signal.
Les supports en cuivre sont relativement bon marché, populaires, faciles à déployer.
1.3. Fibre optique
La fibre optique est insensible aux interférences électromagnétiques et convient aux environnements industriels fortement bruités. Mais la fibre optique peut connaître des interférences dues à un mauvais placement du câble en fibre optique, une soudure mal réalisée, des connecteurs défectueux, etc.
Avec la fibre optique, il n’y a pas de limite théorique sur la distance (plusieurs Km) et sur la vitesse (plusieurs Gb/s).
En soi, la fibre optique n’est pas coûteuse. Par contre, le matériel de connexion et de déploiement est certainement plus coûteux (en compétences, en argent).
1.4. Air
L’air a l’avantage de permettre des connexions au réseau de manière non mécanique. On parle alors de technologies “sans fil”.
Toutefois, c’est un environnement fortement bruité qui peut être corrigé par :
- des mécanismes de fiabilité protocolaires (réservation de ressources, accusés de réception, reprise sur erreur, etc.)
- des mécanismes physiques comme MIMO.
- Leur portée dépend du type d’onde et de la puissance d’émission.
1.5. Protocoles IEEE 802
Les thèmes d’étude du groupe de travail IEEE 802 sont (dans l’ordre où le groupe de normalisation les énumère) :
- IEEE 802.1 : Gestion des réseaux locaux, VLAN, authentification, etc.
- IEEE 802.2 : Distinction entre couche Logical Link Control (LLC) et Media Access Control (MAC)
- IEEE 802.3 : Couche média CSMA/CD Ethernet
- IEEE 802.4 : Couche média CSMA/CA Token Bus et AppleTalk (utilisée en informatique industrielle) (dissous)
- IEEE 802.5 : Couche média Token Ring (IBM)
- IEEE 802.6 : Groupe de conseils sur les réseaux à grande distance (Réseau métropolitain ou MAN) (dissous)
- IEEE 802.7 : Groupe de conseils sur les réseaux à large bande (dissous)
- IEEE 802.8 : Groupe de conseils sur les réseaux sur fibre optique (dissous)
- IEEE 802.9 : Réseaux à intégration de services comme RNIS (dissous)
- IEEE 802.10 : Interopérabilité de la sécurité des LAN/MAN (dissous)
- IEEE 802.11 : Réseaux sans fil : réseau sans fil, Wi-Fi
- IEEE 802.12 : Réseaux locaux utilisant le mécanisme de demande de priorité
- IEEE 802.13 : Inutilisé (À l’origine réseaux Mapway (dissous))
- IEEE 802.14 : Réseaux et modems câble (dissous)
- IEEE 802.15 : Réseaux privés sans fil (WPAN) comme le Bluetooth
- IEEE 802.16 : Réseaux sans fil à large bande par exemple le WiMAX
- IEEE 802.17 : Réseaux de fibres optiques en anneau (Resilient Packet Ring)
- IEEE 802.18 : Groupe de conseils pour la normalisation des communications radioélectriques
- IEEE 802.19 : Groupe de conseils sur la cohabitation avec les autres standards
- IEEE 802.20 : Accès sans fil à bande large
- IEEE 802.21 : Transfert automatique des liaisons indépendamment du média
- IEEE 802.22 : Réseaux régionaux sans fil
Source : https://fr.wikipedia.org/wiki/IEEE_802.
2. Technologie Ethernet
Ethernet est actuellement la technologie filaire LAN L2 dominante. Son succès s’explique notamment par divers facteurs tels que :
- Diversité des supports : Cuivre (paire torsadée) et Fibre ;
- Interopérabilité (vers IP, vers les protocoles IEEE 802) ;
- Stabilité des infrastructures (supports) / Évolutivité de la technologie (services) ;
- Bon marché ;
- Facilité de déploiement ;
- Fiabilité assurée par l’infrastructure et par la commutation.
| Nom commercial | Ethernet |
|---|---|
| Portée | Locale (LAN) |
| Norme | IEEE 802.3 |
| Supports | paire torsadée ou fibre optique |

2.1. Ethernet dans les modèles de communication
Du point de vue du modèle TCP/IP, Ethernet remplit la couche “Accès au Réseau”. Dans le modèle OSI, Ethernet couvre les couches “Liaison de données” (L2) et “Physique” (L1).
Les trames IEEE 802.3 utilisent le protocole “Logical Link Control” (LLC) pour embarquer des protocoles de couches supérieures.
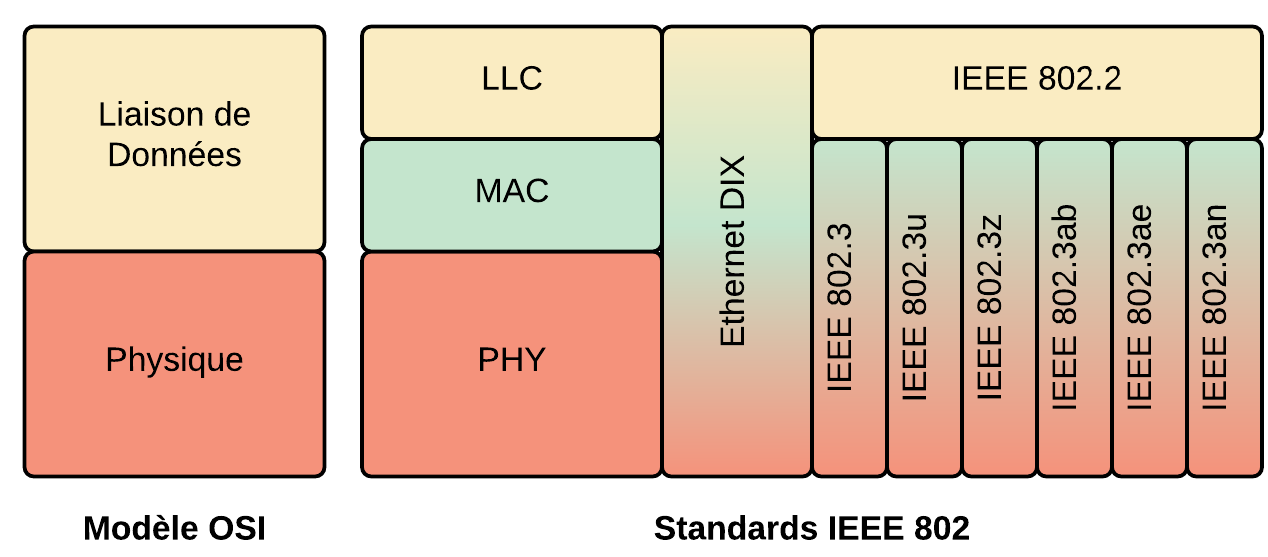
Les caractéristiques de la technologie Ethernet sont les suivantes :
- Une technologie d’accès LAN et MAN
- Standardisé IEEE 802.3
- Aidé par IEEE 802.1 (Bridging) et IEEE 802.2 (LLC).
- de couche Liaison de données (L2) MAC : CSMA/CD
- et de couche Physique (L1)
- réputée non fiable (sans messages de fiabilité)
- non orientée connexion (pas d’établissement d’un canal préalable à la communication)
2.2. Versions de la technologie Ethernet
On trouvera ici le nom commercial, la vitesse théorique, la dénomination physique, le standard IEEE et des caractéristiques physiques sommaires des technologies Ethernet les plus courantes.
| Nom commercial | Vitesse | Dénomination physique | Standard | Support, longueur |
|---|---|---|---|---|
| Ethernet | 10 Mbps | 10BASE-T | IEEE 802.3 | Cuivre, 100 m |
| Fast Ethernet | 100 Mbps | 100BASE-TX | IEEE 802.3u | Cuivre, <100 m |
| Gigabit Ethernet | 1 Gbps | 1000BASE-SX, 1000BASE-LX | IEEE 802.3z | Fibre, 550 m, <5 Km |
| Gigabit Ethernet | 1 Gbps | 1000BASE-T | IEEE 802.3ab | Cuivre, <100 m |
| 10Gigabit Ethernet | 10 Gbps | 10GBASE-SR, 10GBASE-LR | IEEE 802.3ae | Fibre, 300 m, <25 Km |
| 10Gigabit Ethernet | 10 Gbps | 10GBASE-T | IEEE 802.3an | Cuivre, <100 m |
| 40Gigabit Ethernet | 40 Gbps | 40GBASE-SR, 40GBASE-LR | IEEE 802.3ba | Fibre, 125 m, <10 Km |
| 100Gigabit Ethernet | 100 Gbps | 100GBASE-SR, 100GBASE-LR | IEEE 802.3ba | Fibre, 125 m, <10 Km |
Avec Ethernet, un câble à paires torsadées est toujours déployé sur un segment physique de maximum 100 mètres, quel que soit sa catégorie ou son blindage. Au-delà de cette distance, la gestion des collisions (qui sont intrinsèques à la technologie) ne sera plus gérée de manière correcte.
En fibre optique, selon sa catégorie, on trouvera plusieurs options en support de longueurs et en vitesse qui ne sont pas détaillées ici.
2.3. Autonégociation
Les vitesses Ethernet et les modes half-duplex / Full Duplex sont autonégiociés par les interfaces des cartes réseau et des commutateurs avec des impulsions électriques qui définissent un mode commun. Il est conseillé de laisser les interfaces autonégocier la vitesse et le mode.
Par exemple sur un commutateur Cisco :
Switch(config-if)#speed ?
10 Force 10 Mbps operation
100 Force 100 Mbps operation
1000 Force 1000 Mbps operation
auto Enable AUTO speed configuration
3. Câble à paire torsadée
3.1. Norme EIA 568A/568B
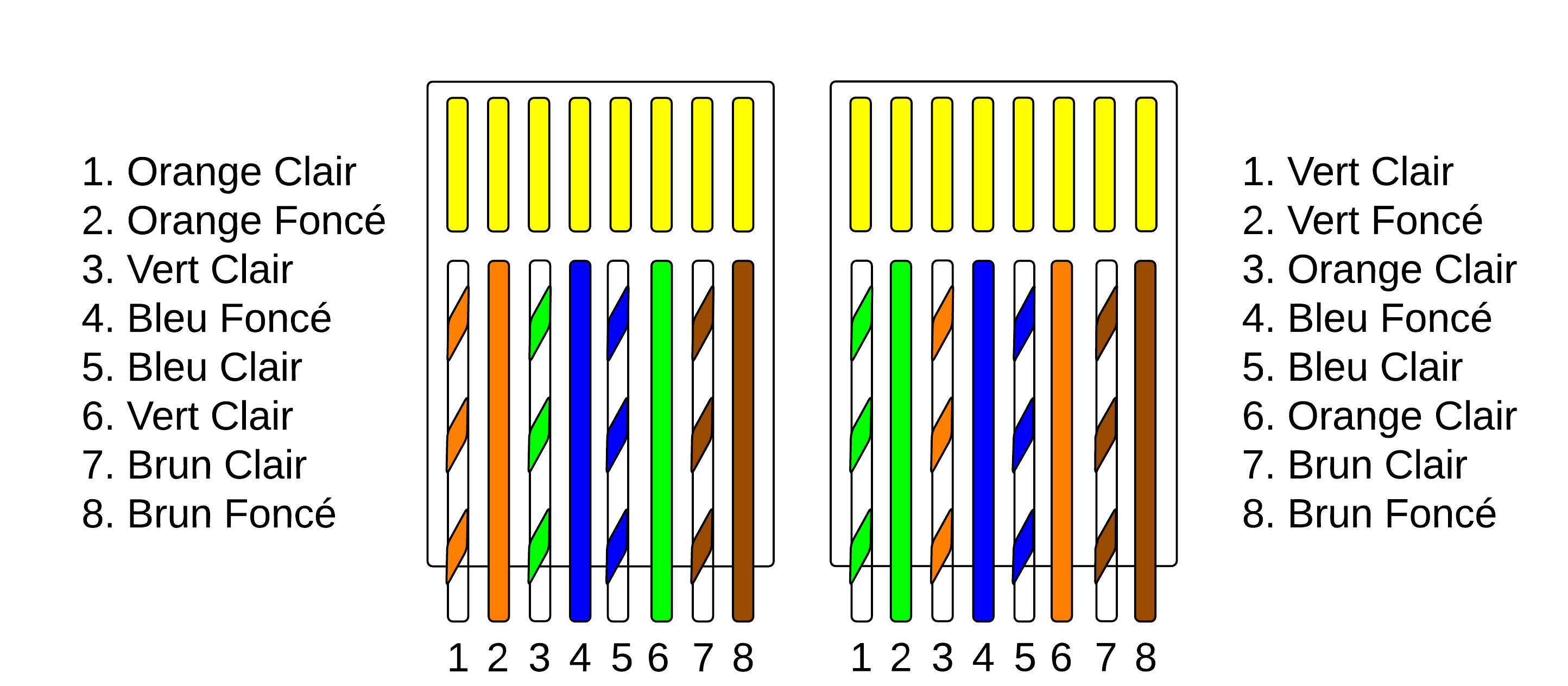
On utilise ce câble en catégories récentes avec une prise modulaire RJ45 (8P8C). Les schémas de brochage répondent aux normes de câblage structuré T568A et T568B.
3.2. Câbles droits et câbles croisé
Les commutateurs (switches) et concentrateurs (hubs) sont identifiés comme étant des DCE (Data Connexion Equipement) alors que les stations terminales et les routeurs sont des périphériques DTE (Data Terminal Equipment). Les équipements identiques DTE/DTE ou DCE/DCE se connectent avec un câble croisé (qui croise les paires d’émission et de réception). Les équipements de type différents se connectent avec un câble droit car la position émission/réception sur leurs interfaces est déjà inversée.
- Câble droit (straight)
- Câble croisé (cross-over)
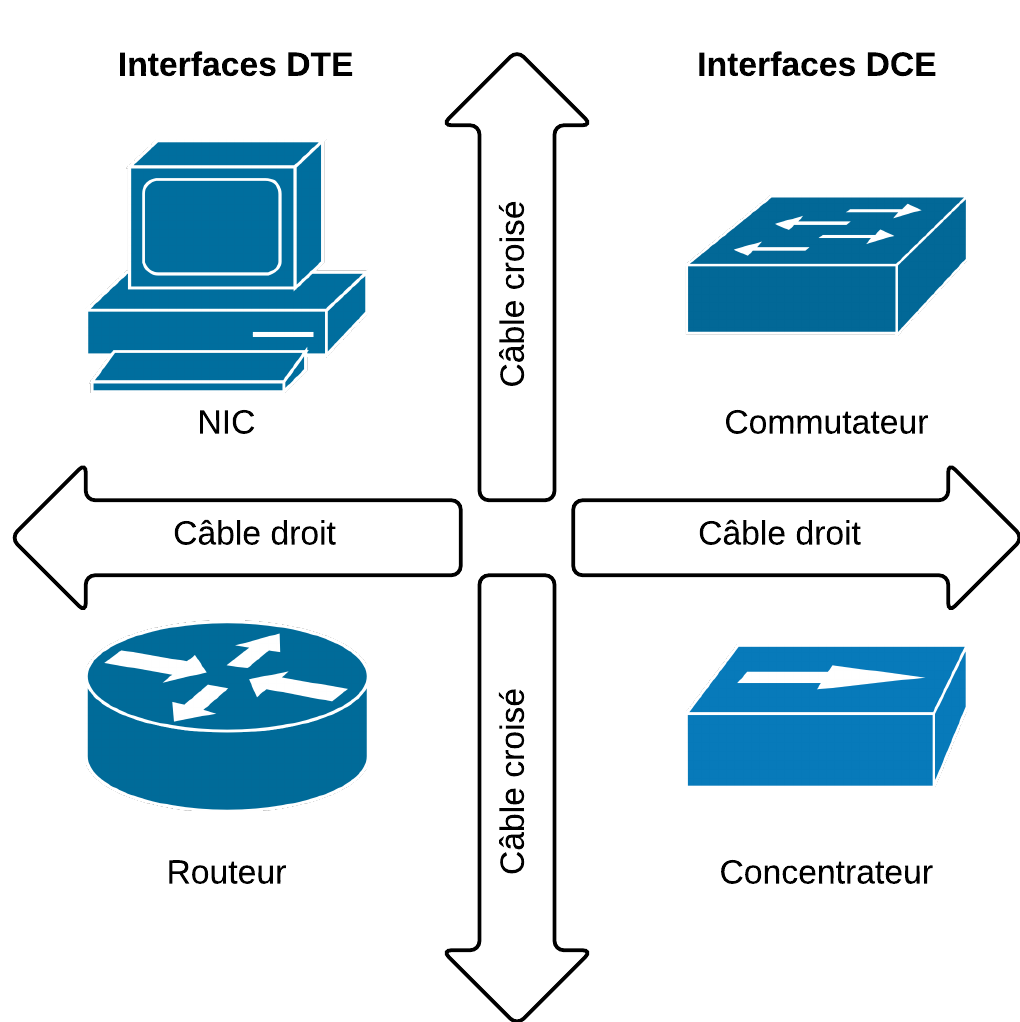
Outre le fait que les nouvelles gammes de matériel actif s’adaptent automatiquement aux câbles en reconnaissant les positions du signal, on utilisera soit du câble croisé ou droit selon le type de matériel que l’on connecte. Cette fonctionnalité s’appelle “Auto-MDIX”.
Câbles droits
- PC à Hub
- PC à Switch
- Switch à Routeur
Câbles croisés
- Switch à Switch
- Hub à Hub
- Routeur à Routeur
- PC à PC
- Hub à Switch
- PC à Routeur
3.3. Règles d’or du câblage à paire torsadée
Respecter les règles du câblage structuré pour le câblage horizontal sur des connexions T568A/T568B est élémentaire :
- 6 mètres de la station terminale à la prise murale.
- 90 mètres en câblage horizontal jusqu’au panneau de brassage.
- 3 mètres jusqu’au commutateur.
- éloigner le câble de tout élément de puissance.
Aussi, on aura une préférence pour les câbles préfabriqués et certifiés sans blindage, des choix de couleurs, des solutions d’étiquetage, etc.
3.4. Câbles inversés
- Câble inversé (roll-over), console
3.5. Types de blindage et catégorie de câbles à paires torsadées
Les câbles à paires torsadées peuvent disposer de différents types de blindages et sont organisés en catégories en fonction des versions d’Ethernet à supporter1. On conseille toujours de prendre la catégorie courante voire la dernière selon son budget. Quoi qu’il en soit, les bonnes pratiques de câblage sont en dehors des objectifs vérifiés par le CCNA.
Les types de blindages
- Paire torsadée non blindée
- Paire torsadée écrantée
- Paire torsadée blindée
- Paire torsadée écrantée et blindée
- Paire torsadée super blindée
Les catégories de câbles
- Catégorie 5
- Catégorie 5e / classe D
- Catégorie 6 / classe E
- Catégorie 6a / classe Ea
- Catégorie 7a / classe Fa
- Catégorie 8
4. Fibre optique
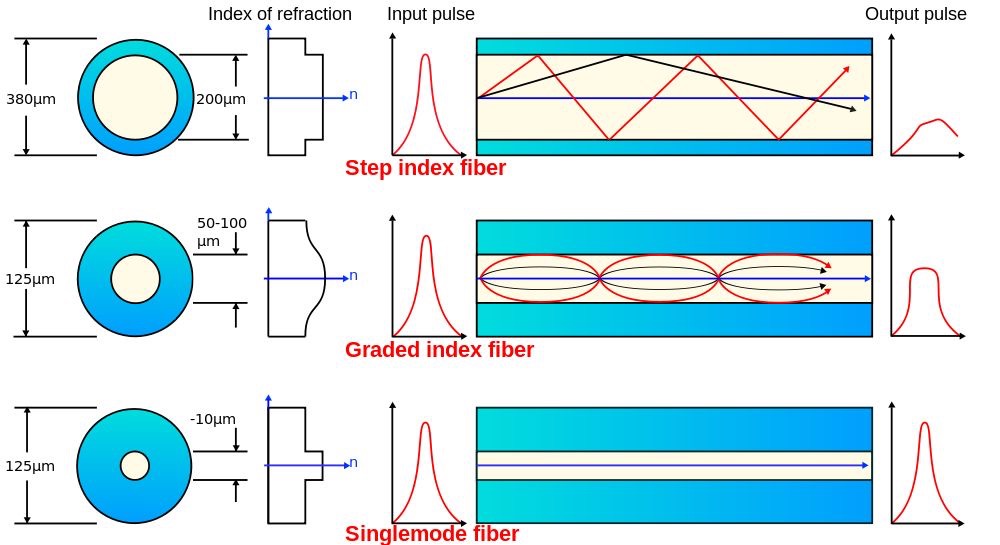
4.1. La fibre optique multimode
Les rayons lumineux peuvent suivre des trajets différents suivant l’angle de réfraction. Les rayons peuvent donc arriver au bout de la ligne à des instants différents, d’une certaine dispersion du signal. Elles sont généralement utilisées pour de courtes distances, elles ont pour émetteur une diode électroluminescente et des performances d’environ 1 gigabit/Km. La fibre optique multimode est généralement utilisée pour de courtes distances (de l’ordre de la centaine de mètres). Elle est la plus employée pour les réseaux privés.
4.2. La fibre optique monomode
Les rayons suivent un seul chemin. La fibre optique monomode a le coeur si fin (de l’ordre de la longueur d’onde du signal transmis) que le chemin de propagation des différents modes est pratiquement direct. La dispersion du signal est quasiment nulle, le signal est donc très peu déformé. Ses performances sont d’environ 100 gigabits/km, l’indice de réfraction peut être constant ou décroissant. Cette fibre optique est utilisée essentiellement pour les sites à distance. Le petit diamètre du coeur nécessite une grande puissance d’émission, donc des diodes au laser qui sont relativement onéreuses (ce qui rend la fibre optique monomode plus chère que la fibre optique multimode). Du fait de ses débits très importants, mais de son coût élevé, cette fibre est utilisée essentiellement pour les sites à grande distance et très grande distance.
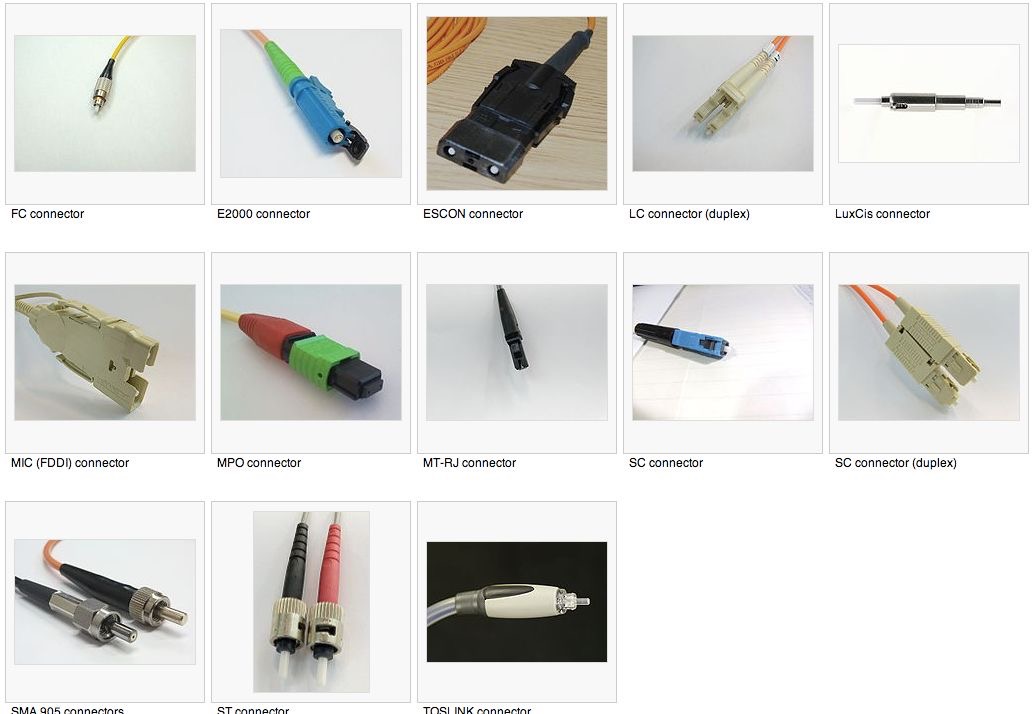
4.3. Types de connecteurs fibres
On trouvera un grand nombre de connecteurs fibres.
4.4. DWDM (Dense Wavelength-Division Multiplexing)
DWDM (Dense Wavelength-Division Multiplexing) est une technologie de fibre optique qui multiplie la quantité de bande passante dans un seul brin de fibre. DWDM permet des communications bidirectionnelles sur un même brin. Il est capable de multiplexer jusqu’à 80 canaux de 10 Gbps sur une seule fibre. Il supporte les standards SONET et SDH.
Les circuits DWDM sont utilisés dans tous les câbles sous-marins de communication et longue distance.

5. Ethernet (CSMA/CD) IEEE 802.3
Ethernet est une technologie à support partagé. L’accès au support est donc concurrentiel.
La technologie Ethernet répond au principe “premier arrivé, premier servi” et se propose de gérer le phénomène intrinsèque des collisions.
Ethernet ne met en oeuvre aucun mécanisme de fiabilité ou de connexion. Tout au plus, une interface (destination finale ou commutateur intermédiaire) va vérifier la trame reçue. En cas de trame corrompue, le trafic est abandonné, sans plus.
5.1. Topologie logique et topologie physique
La topologie logique est la méthode d’accès (MAC) au support physique.
On distingue :
- Les méthodes stochastiques, premier arrivé premier servi (Ethernet, Wi-Fi).
- Les méthodes déterministes, par passage de jeton, contrôlé (Token-Ring).
5.2. CSMA/CD
La méthode d’accès MAC est appelée : Carrier Sense Multiple Access with Collision Detection (CSMA/CD) :
- Principe premier arrivé premier servi.
- Si le canal est libre, la station place son trafic.
- Si ce n’est pas le cas, elle attend.
- Le protocole se propose de gérer les collisions.
- Pas de fonction de fiabilité (ACK), pas de fonctions de gestions d’erreur, de contrôle de flux, etc.
- CSMA/CD = Ethernet Legacy (10BASE2, 10BASE5, 10BASE-T)
5.3. Principe CSMA (Carrier Sense Multiple Access)
- Une interface qui tente de placer une trame écoute le support.
- En cas de porteuse, elle retarde le placement de la trame.
- En l’absence de porteuse (support libre), elle attend encore quelques instants (96 Bit Time) et commence à placer le trafic.
- Elle va rester attentive à d’éventuelles collisions pendant un certain délai appelé le “slot time” (512 Bit Time).
- Après expiration de ce délai, l’interface n’est plus attentive à d’éventuelles collisions. Elle considère le canal acquis. Elle continue à émettre sans plus rien attendre (pas de ACK).
- Sur un média partagé, quelle que soit la topologie physique, toutes les interfaces reçoivent ce trafic. Elles examinent toutes l’en-tête Ethernet du trafic reçu, ce qui suscite de la charge en CPU et en bande passante.
- Seule l’interface qui reconnaît son adresse MAC dans le champ destination livre la trame à la couche supérieure.
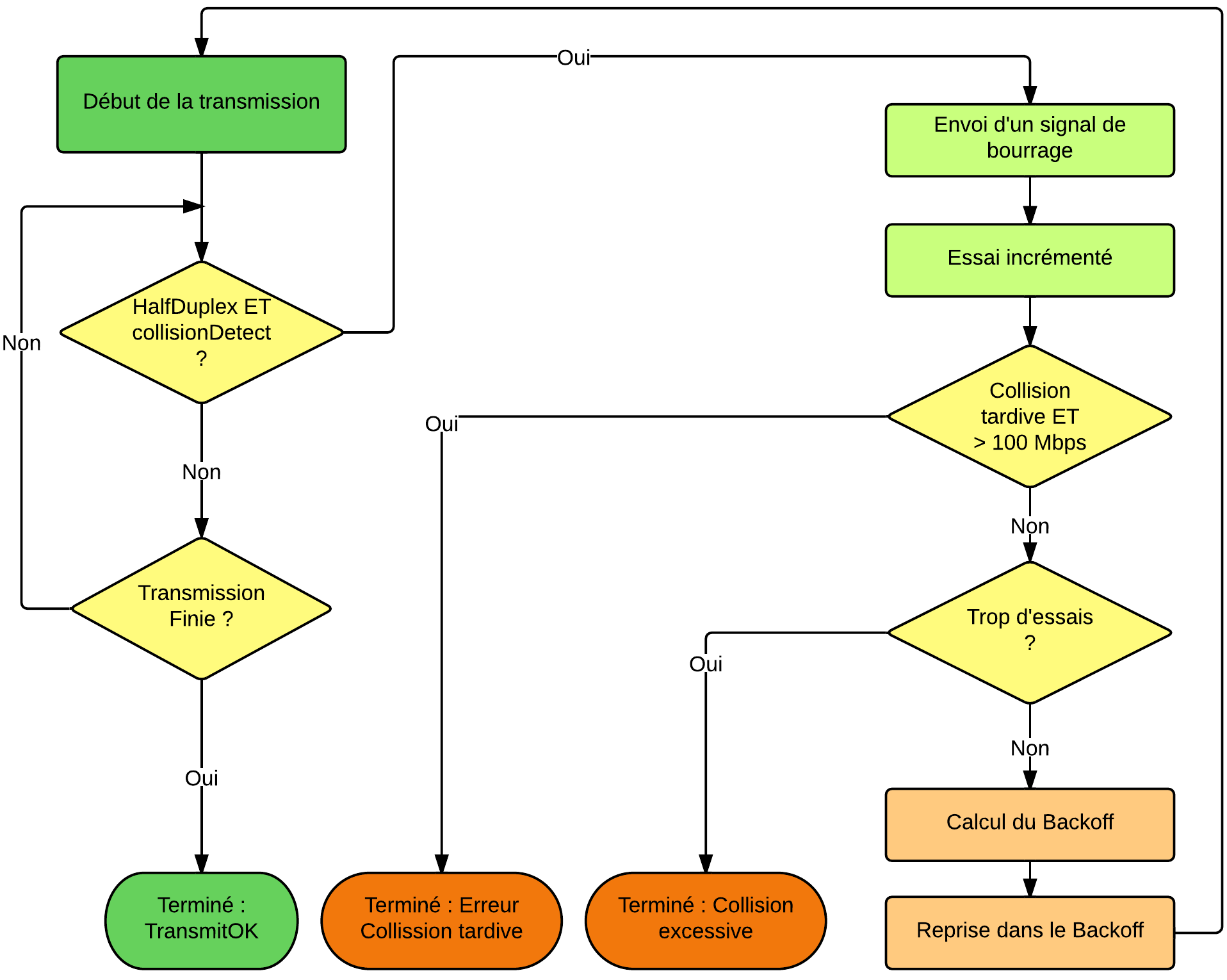
5.4. Gestion des collisions (CD)
Sur un support partagé, une collision peut survenir lorsque deux ou plusieurs interfaces tentent de placer une trame en même temps alors qu’elles ont constaté un support libre (absence de porteuse).
Parce qu’il faut un certain délai pour qu’une trame arrive d’une extrémité à l’autre du support, l’interface émettrice va rester attentive pendant ce temps à d’éventuelles collisions. Les standards 802.3 définissent précisément ce temps. Il est appelé le slot time. Jusqu’en 100 Mbps, il s’agit du temps de placement de 512 bits ou 64 octets.
- En cas de collision, les stations impliquées la renforcent en envoyant un signal de bourrage afin que toutes les interfaces du réseau l’entendent.
- Elles attendent alors de reprendre la procédure de placement de la trame dans un délai aléatoire. C’est ce qu’on appelle le mécanisme de Backoff prévu par le protocole.
- Précisément, les stations impliquées reprendront aléatoirement dans une fourchette variant de 0 à un multiple du slot time.
Le support partagé par du matériel de couche 1 (Hub, concentrateur, câble en bus) est appelé domaine de collision. La bande passante est partagée dans un domaine de collision.
5.5. Délais
Les délais dans la technologie Ethernet dépendant de la qualité de l’infrastructure. Si celle-ci connaît des défaillances physiques dans le câblage, les connecteurs, les prises de connexion ou les panneaux de brassages, on aura des délais et une expérience diminuée de la technologie, voire une incapacité.
C’est parce que le signal se propage dans un délai certain encodé dans les cartes réseau Ethernet que taille maximale d’un segment est fixée à 100 mètres sur du câble à paires torsadées.
6. Trame Ethernet 802.3
On trouvera deux types de trames Ethernet : IEEE 802.3 standard et Ethernert II (DIX). Les trames DIX sont celles qui sortent des cartes réseau de nos ordinateurs terminaux (stations de travail, imprimantes, serveurs traditionnels). Les trames IEEE 802.3 sont émises par du matériel “legacy” d’infrastructure de type commutateur ou routeur.
6.1. Format de trame Ethernet 802.3
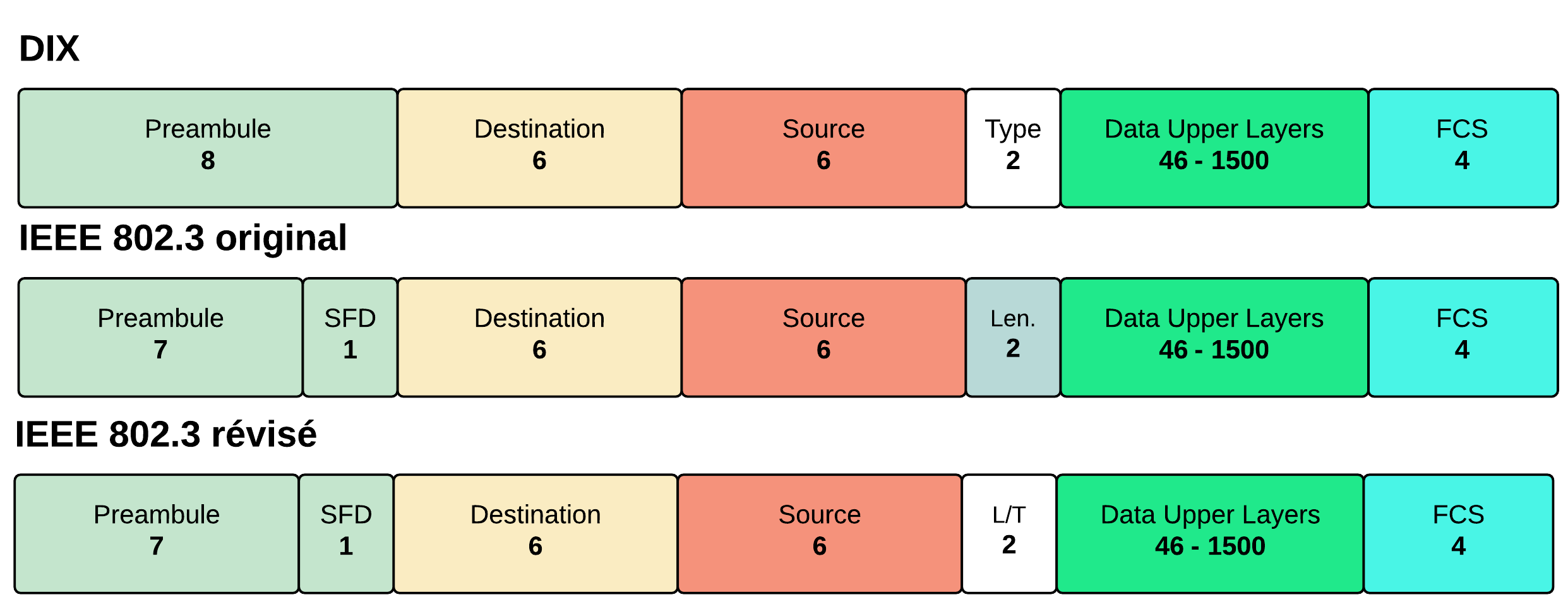
Une trame Ethernet dispose de deux champs d’adresses : “destination” et “source” codées sur 48 bits chacune.
Ensuite, on y trouve soit un champ “longueur” ou un champ “type”. Le champ “type” annonce la charge contenue dans la trame. Dans une trame IEEE 802.3, le protocole LLC (Logical Link Control) s’occupe d’interfacer des protocoles de couche 2 comme CDP ou Spanning-Tree par exemple.
Enfin, en “en queue” de trame, on trouve un champ de 4 bits “FCS” (Frame Check Sequency) qui vérifie l’intégrité de la trame. L’hôte émetteur fabrique une somme de contrôle et l’inscrit dans ce champ ; à la réception, les hôtes Ethernet vérifient cette valeur. Quand les valeurs ne correspondent pas, Ethernet ne propose aucun mécanisme de reprise, la trame est abandonnée. La fiabilité pourrait être assurée par un protocole de couche supérieure comme TCP.
A titre d’exercice, quelle est la différence entre ces deux types de trames ?
- des trames IEEE 802.3 CDP émises d’un commutateur Cisco
- des trames Ethernet ARP émises d’un hôte quelconque.
6.2. Champ “Ethertype”
Le champ “type” d’une trame Ethernet annonce la charge qu’elle comprend. On trouve une liste sommaire dans le tableau suivant.
| Ethertype | Protocole |
|---|---|
| 0x0800 | Internet Protocol version 4 (IPv4) |
| 0x0806 | Address Resolution Protocol (ARP) |
| 0x8100 | VLAN-tagged frame (IEEE 802.1Q) |
| 0x86DD | Internet Protocol Version 6 (IPv6) |
| 0x8863 | PPPoE Discovery Stage |
| 0x8864 | PPPoE Session Stage |
| 0x8870 | Jumbo Frames |
| 0x888E | EAP over LAN (IEEE 802.1X) |
| 0x9100 | Q-in-Q |
6.3. Adressage MAC 802
L’adresse MAC 802 est un adressage de livraison locale, de couche 2, on peut le caractériser comme étant un adressage “physique”.
- Une adresse MAC est fondée dans la carte.
- Elle est codée en 48 bits notés en hexadécimal
AA:BB:CC:DD:EE:FF - Les 24 premiers bits d’une adresse MAC identifient le constructeur de l’interface réseau et sont appelés Organizationaly Unique Identifier (OUI). Les préfixes OUI sont enregistrés auprès de l’IEEE.
- Les 24 derniers bits sont laissés à la discrétion du constructeur.
- L’adressage MAC-EUI64 est un adressage étendu de 16 bits
FFFE:AA:BB:CC:FF:FE:DD:EE:FF
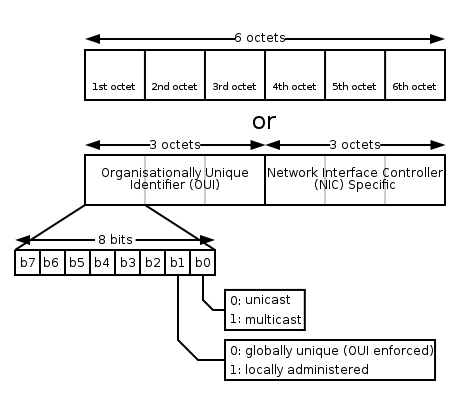
Source de l’image : Adressage MAC IEEE 802.
Note : Lors de l’opération de transformation de 48 à 64 bits, il est nécessaire de renverser le bit “Universal/Local” (“U/L bit”) à la septième position du premier octet. Le bit “u” bit est fixé à 1 (Universal) et il est fixé à zéro (0) pour indiquer une portée locale de l’adresse.
6.4. Préfixes d’adresses MAC
Comme en IP on trouve un adressage MAC Unicast, Broadcast et Multicast.
L’adressage Unicast est celui qui est à destination d’une seule interface. On trouvera la liste des préfixes IEEE MAC dans ce fichier : Sanitized IEEE OUI Data (oui.txt).
Une adresse de (diffusion) Broadcast est à destination de toutes les interfaces :
FF:FF:FF:FF:FF:FF
L’adressage Multicast (CDP/VTP, STP, IPv4, IPv6) est celui qui est à destination de certaines interfaces :
- CDP/VTP :
01:00:0C:CC:CC:CC - STP :
01:80:C2:00:00:00 - Multicast IPv4 :
01:00:5E:00:00:00 - 01:00:5E:7F:FF:FF - Multicast IPv6 :
33:33:00:00:00:00 - 33:33:FF:FF:FF:FF
7. Power over Ethernet
La technologie “Power over Ethernet” ou PoE, normalisée IEEE 802.3af permet d’alimenter en courant continu (DC) des périphériques du réseau comme des téléphones IP, des caméras IP, des points d’accès Wi-Fi2 grâce aux câbles à paires torsadées utilisés par Ethernet en même temps que la transmission de données.
7.1. Alimentation électrique via le câble de données
Le PoE fournit environ 48 V en courant continu à travers deux fils non utilisés des quatre fils disponibles avec du câble de catégorie 3 ou 5e, pour du 10BASE-T et du 100BASE-TX. Une technique dite “phantom power” permet également de transporter le courant à travers une paire utilisée pour la transmission de données. Ceci permet donc l’utilisation du PoE avec du 1000BASE-T, en utilisant toutes les paires (catégorie 5e ou plus).
Le PoE original fournit un maximum de 350 mA et une puissance maximale de 15,4 W. Seulement 13 W sont disponibles après décompte de la déperdition de 10 à 20 % de l’énergie disponible dans les câbles (résistance des câbles d’où déperdition de chaleur par effet joule). Cela est d’ailleurs l’un des problèmes à résoudre par les constructeurs de câblage, car la concentration des passages de câbles occasionne un échauffement accru, ce qui implique un vieillissement accéléré et des caractéristiques physiques différentes.3
Habituellement, l’alimentation peut être fournie soit par les ports de commutateurs Ethernet compatibles (et plus coûteux), soit par des injecteurs PoE qui s’insèrent sur le câble de données pour y placer un courant électrique.
7.2. Avantages et objectifs de PoE
PoE permet de faire des économies de coûts d’installation :
- Supprime la nécessité d’installer des prises électriques
- Réduit considérablement les coûts de déploiement
- Pas besoin de gros adaptateurs de courant alternatif
PoE simplifie l’installation :
- Utilise un seul câble Cat5/5e/6 pour les données et l’alimentation
PoE permet d’assurer une sauvegarde centralisée de l’alimentation :
- Fonctionnement continu pendant les interruptions de courant
PoE permet une gestion centralisée de l’alimentation :
- Les appareils peuvent être mis hors tension à distance pendant les périodes de faible utilisation ou pour des raisons de sécurité
PoE permet de sécuriser l’alimentation :
- PoE n’endommagera pas les dispositifs non-PoE ou les périphériques existants
7.3. Fonctionnement de PoE
On trouvera deux types de périphériques PoE :
- Les “Powered Devices (PDs)”, ceux qui sont alimentés comme les téléphones IP, les caméras IP ou encore les points d’accès Wi-Fi.
- Les “Power Sourcing Equipments (PSEs)” comme des commutateurs PoE ou des injecteurs de puissance PoE.
Pour éviter qu’un périphérique reçoive une puissance inappropriée, le standard PoE met en oeuvre un mécanisme d’autonégociation qui permet d’adapter le niveau de puissance (voire de ne pas l’envoyer) selon certaines “classes” entre le Powered Device (PD) et le “Power Sourcing Equipment (PSE)”. Ensuite, des protocoles comme LLDP ou CDP peuvent être utilisés par les PSE pour compléter la configuration.
7.4. Normes PoE
Depuis les années 2000, Cisco Systems a développé des normes d’alimentation par le câble de données qui sont ensuite devenus des standards interopérables ratifiés par l’IEEE. En voici un tableau récapitulatif.
| Nom | Standard | Watts Max. (PSE) | Paires alimentées |
|---|---|---|---|
| Cisco Inline Power | Cisco | 7 | 2 |
| PoE | IEEE 802.3af | 15 | 2 |
| PoE+ | IEEE 802.3at | 30 | 2 |
| UPoE (4PPoE) | IEEE 802.3bt (Type 3) | 60 | 4 |
| UpoE+ | IEEE 802.3bt (Type 4) | 100 | 4 |
8. Identifier les problèmes d’interface et de câbles Ethernet sur le matériel Cisco
Pour identifier des problèmes physiques (L1) tels que des câbles (ou d’interfaces) défectueux, des câbles trop longs, des collisions locales ou tardives, on apprendra à interpréter les sorties de la commande IOS show interfaces.
8.1. Commande show interfaces
La commande show interfaces offre un diagnostic de couche 2 complet que l’on peut décomposer en plusieurs parties :
- Statut de l’interface (L1) et protocole de ligne (L2).
- Des paramètres d’adresses L2 et d’encapsulation, de mode, de vitesse et de type de support, l’interval keepalive.
- Des paramètres de qualité de service (QoS).
- Des statististiques de succès et d’erreurs sur les trames vues par l’interface.
Switch#show interfaces GigabitEthernet 0/0
GigabitEthernet0/0 is up, line protocol is up (connected)
Hardware is iGbE, address is 0c10.2a8e.1c00 (bia 0c10.2a8e.1c00)
MTU 1500 bytes, BW 1000000 Kbit/sec, DLY 10 usec,
reliability 255/255, txload 1/255, rxload 1/255
Encapsulation ARPA, loopback not set
Keepalive set (10 sec)
Auto Duplex, Auto Speed, link type is auto, media type is RJ45
output flow-control is unsupported, input flow-control is unsupported
ARP type: ARPA, ARP Timeout 04:00:00
Last input 03:21:22, output 00:00:00, output hang never
Last clearing of "show interface" counters never
Input queue: 0/75/0/0 (size/max/drops/flushes); Total output drops: 0
Queueing strategy: fifo
Output queue: 0/0 (size/max)
5 minute input rate 0 bits/sec, 0 packets/sec
5 minute output rate 0 bits/sec, 0 packets/sec
67 packets input, 10022 bytes, 0 no buffer
Received 62 broadcasts (62 multicasts)
6 runts, 0 giants, 0 throttles
6 input errors, 0 CRC, 0 frame, 0 overrun, 0 ignored
0 watchdog, 62 multicast, 0 pause input
10911 packets output, 817382 bytes, 0 underruns
0 output errors, 0 collisions, 2 interface resets
0 unknown protocol drops
0 babbles, 0 late collision, 0 deferred
1 lost carrier, 0 no carrier, 0 pause output
0 output buffer failures, 0 output buffers swapped out
8.2. Statut d’interface
Le statut d’interface peut prendre trois valeurs[^2] et signifie un problème de couche 1, soit de signal sur le câble :
-
administratively down: interface désactivée -
down: l’interface ne reçoit pas de signal -
up: l’interface reçoit du signal
| Statut d’interface | Signification | Remède |
|---|---|---|
administratively down | l’interface est “shutdown” | monter l’interface avec la commande no shutdown |
down | l’interface ne reçoit pas de signal | problème physique, l’interface connectée est désactivée, le câble est “pendant” |
up | l’interface reçoit du signal | interface opérationnelle au niveau de la couche 1 |
8.3. Protocole de ligne
Le diagnostic “line protocol is” est un diagnostic de couche 2 (L2) qui indique si le protocole Ethernet est opérationnel. Étant donné qu’il est totalement discret, on aura des erreurs indiquées à cet endroit. Mais par exemple, en PPPoE avec un défaut d’authentification empêche le protocole de se monter.
Line Protocole prend deux valeurs possibles :
-
up: le protocole de couche 2 est opérationnel. -
down: le protocole de couche 2 ne répond pas.
Voici les cas de diagnostic de “line protocol is down” :
| Statut d’interface | Protocole de ligne | Signification |
|---|---|---|
administratively down | down | sans couche 1, pas de couche 2 |
down | down | sans couche 1, pas de couche 2 |
up | down | L’interface reçoit du signal, mais n’arrive pas négocier un paramètre de couche 2 |
8.4. Problèmes d’interfaces et de câbles Ethernet
Dans la dernière partie du résultat de la commande show interafces, sur les statistiques, on retiendra la signification quelques valeurs comme runts, CRC ou collisions :
| Valeur de la statistique | Signification |
|---|---|
| runts | Donne le nombre de paquets qui sont rejetés parce qu’ils sont plus petits que la taille minimale de paquet du support. Par exemple, tout paquet Ethernet de moins de 64 octets est considéré comme un avorton. |
| CRC | Indique que la somme de contrôle de redondance cyclique (CRC, “cyclic redundancy checksum”) générée par la station LAN d’origine ou le dispositif distant ne correspond pas à la somme de contrôle calculée à partir des données reçues. Sur un réseau local, cela indique généralement des problèmes de bruit ou de transmission sur l’interface du réseau local ou sur le bus du réseau local lui-même. Un nombre élevé de CRC est généralement le résultat de collisions ou d’une station transmettant de mauvaises données. |
| collisions | Donne le nombre de messages retransmis à la suite d’une collision Ethernet. Ceci est généralement le résultat d’une extension excessive du réseau local (câble Ethernet ou émetteur-récepteur trop long, plus de deux répéteurs entre les stations, ou trop d’émetteurs-récepteurs multiports en cascade). Un paquet qui entre en collision n’est compté qu’une seule fois dans les paquets de sortie. |
Différents problèmes de câblage peuvent intervenir sur des interfaces Ethernet :
- Bruit excessif (Excessive noise)
- Collisions excessives (Excessive collisions)
- Trames avortons excessives (Excessive runt frames)
- Collisions tardives (Late collisions)
- “No link integrity”
8.5. Bruit excessif (Excessive noise)
Avec du bruit excessif (Excessive noise) les valeurs d’erreurs CRC sont en grand nombre par rapport aux erreurs de collision.
8.6. Collisions excessives (Excessive collisions)
Le taux de collision, qui correspond au nombre de collisions par rapport au nombre de paquets sortants, ne devrait jamais être inférieur à 0,1%.
8.7. Trames avortons excessives (Excessive runt frames)
Dans un environnement Ethernet partagé, les trames avortons sont presque toujours causées par des collisions. Si les trames avortons se produisent lorsque les collisions ne sont pas élevées ou dans un environnement Ethernet commuté, elles sont alors le résultat de sous-exécutions (underruns) ou de mauvais logiciels d’une carte d’interface réseau.
8.8. Collisions tardives (Late collisions)
Les collisions tardives ne devraient jamais se produire dans un réseau Ethernet correctement conçu. Elles se produisent généralement lorsque les câbles Ethernet sont trop longs ou lorsqu’il y a trop de répéteurs dans le réseau.
8.9. “No link integrity”
Ce type d’erreur “No link integrity” suggère de vérifier le type de câble.
